







")














In the early days of the marine industry, the vessels required the continuous attention of seamen to sail safely. As ship range increased, allowing ships of longer routes, the constant scrutiny led to severe fatigue. An autopilot is aimed to perform some of the tasks of the pilot.
In 1920, the first automated steering gear system along with helm control system was introduced on merchant ships. In the early days of Merchant shipping, able seaman job was to steer the ship according to Masters or OOW (Officer On Watch) orders all day at sea.
Autopilot steering system was a revolution in the Marine field which reduces the workload of an able seaman to a maximum extent. The main job of the autopilot system is to maintain the set course within the specified range. But modern autopilot has the facility of synchronization with ECDIS and thus it steers the course as specified in passage plan. With this feature, we do not need to alter the course manually when the ship has reached to do desired waypoints of passage plan.
In order to understand auto pilot working for merchant ships. We should know the modes of steering. Following are the various modes of steering:-
- AUTO PILOT
- HAND/ MANUAL Steering ( Follow Up)
- NFU MODE Of Steering ( Non Follow Up)
- EMERGENCY Steering ( Non Follow Up)
In the first three modes of steering, we are operating the steering from a remote place i.e. from the bridge but in case of emergency steering, we are operating it from local.
Following are the certain conditions where it is not advisable to put steering into Autopilot mode –
- During Manoeuvring
- where traffic is heavy
- shallow waters
- when the vessel is running at a slow speed
- in case of rough weather
- in case of restricted visibility
- in case of large alteration of the ship
 The word follow up means when any command is given or when the wheel is turned to a specified angle, the rudder also turns in a specified direction to achieve the desired angle, i.e. Rudder is following the helm order. When the wheel is returned to zero, the rudder will also return to zero.
The word follow up means when any command is given or when the wheel is turned to a specified angle, the rudder also turns in a specified direction to achieve the desired angle, i.e. Rudder is following the helm order. When the wheel is returned to zero, the rudder will also return to zero.
In the case of Non-Follow-Up mode, there are three positions neutral, right and left. When we turn the actuator in the right direction, the rudder starts turning in starboard direction but when the operator removes his hand from the actuator, it comes to a neutral position but rudder remains in the same position.
Autopilot Control System having a PID controller
PID controller comprises of the three terminologies.
Proportional
The control action of the proportional controller depends upon error. (Differences between set course and feedback from zyro).
Controller output = Kp X deviation, where Kp is a constant.
Integrals
It works on the accumulations of past error i.e. summation of all instantaneous value of error and integrates the error with respect to time.
Derivative
The control action of the derivative controller depends upon the rate of change of error. If the rate of change is more, then proportionally control action will be also more and it reduces with respect to error reduction.
It depends upon ship characteristics, the condition of the ship like loaded or ballast and rate of turn.
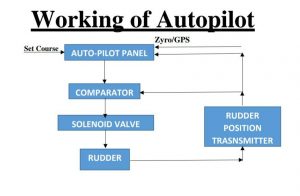
Autopilot panel has a knob to set what course we want to steer. Autopilot panel also receives feedback from zyro. The difference between the feedback signal and the set course will be compared by the comparator and will generate an error signal.
Autopilot panel has a knob to set what course we want to steer. Autopilot panel also receives feedback from zyro. The difference between the feedback signal and the set course will be compared by the comparator and will generate an error signal. The error signal will go to the master solenoid and it will operate the hydraulic telemotor in steering gear room, and it will send the hydraulic signal to 3-way value. Further, it will operate the actuating system.
The rudder will tend to move in the desired direction to achieve a set course and correspondingly zyro heading will change. When feedback matches with the set course then an error will be zero and comparator will give the signal for the closing of the
solenoid. The deviations from the set course are due to external forces like water current, wind force etc. The autopilot control system will counter on that external forces and maintain the set course.
If we are giving them order greater than 15 or 20 degrees then there is an excessive speed loss, with respect to course alternation. This is the reason that helm order in case of autopilot is limited to 5, 10, 15 and 20 degrees these limitations depends upon weather conditions and open or coastal water.
If ship deviates from the set course and goes beyond predetermined limit then there is a safety called “OFF COURSE ALARM” to warn the navigator that there is some problem with auto pilot.
One misconception that most of the seafarers have, failure of autopilot is considered as steering failure but that’s not true, even in case of failure of auto pilot control, we can steer the ship in a safe manner.
Conclusion
With the autopilot system, we have reduced the effort of human in navigating the ship, especially in open waters. So chances of error are also reduced. Reliability has increased. The new autopilot system is programmed with characteristics of ship’s handling and hence it minimizes the movement of the rudder and helps in reduction of vessel’s drag. Speed is increased causing lower fuel consumption. So the operating cost of the vessel has decreased and thus large savings to ship owners.






")




{kind=link}